自动驾驶进入L3时代,为什么大家都需要高精地图?
前不久我们的一篇内容指出,目前自主厂商所推出的L3级量产车上都搭载了高精地图。高精地图究竟是什么?为什么自动驾驶需要它?今天我们就来详细讲一讲。

在讲高精地图本身之前,我们先来回顾一下自动驾驶的基本逻辑。
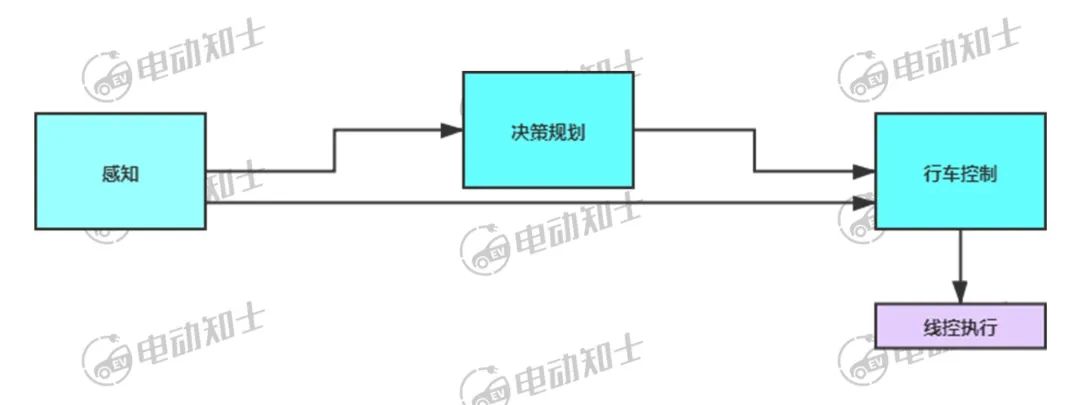
简单来讲,自动驾驶的实现主要有三个步骤:感知、决策规划、行车控制。这与你走路上班/上学的逻辑是相似的:眼睛看到画面,告诉大脑,然后你就知道了自己在哪里,以及要往哪个方向走,并指挥你的腿迈开步伐。
在自动驾驶系统中,感知主要解决两个问题:车周围有什么,以及车在哪。车没有眼睛,我们就要赋予它“眼睛”。这就是它的环境感知系统,一般由视觉传感器(摄像头)、雷达(毫米波、超声波、激光)等多种传感器融合而成。
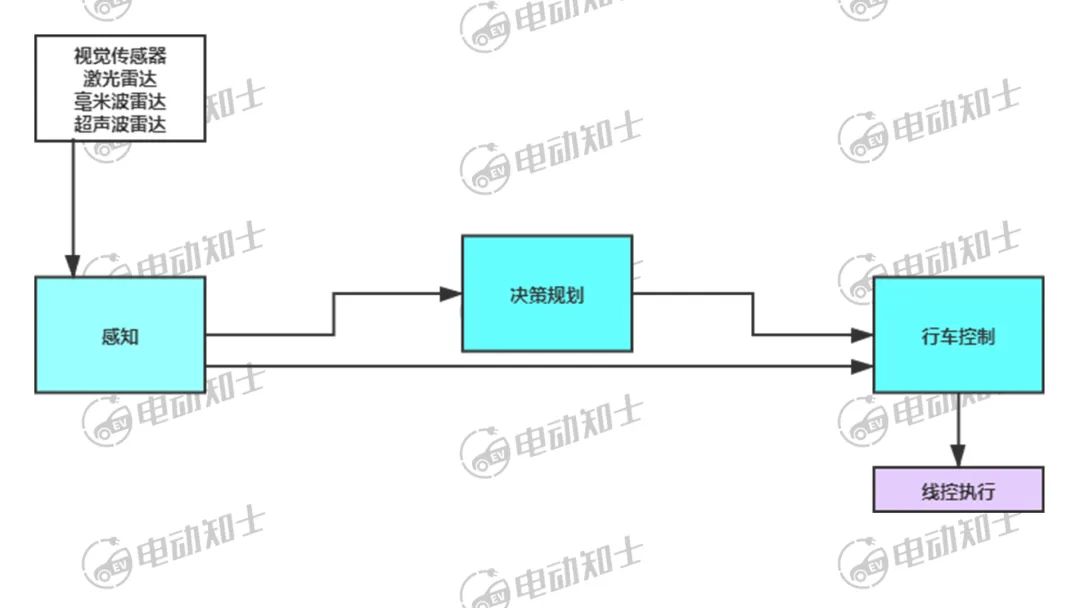
在这些传感器的协同工作下,感知系统就可以知道,车辆周围都有哪些东西,比如车、人、路、树、墙、路牌等等。在将这些数据提供给决策系统后,决策系统根据算法,就知道车辆可不可以行驶,可以以最大多少的速度行驶,以及是否需要控制前轮转弯,并传输指定给行车控制系统。
在特定条件下,感知系统也会直接传输数据给行车控制系统,这主要应用在AEB上,也就是紧急主动安全系统,以保证在最短的时间内对紧急情况进行响应。
但这里有个问题,你走路之所以知道要怎么走,是因为你对这条路线很熟悉,脑子里有地图,知道接下来要怎么走。但车辆仅凭感知系统,是无法知道接下来应该如何行使的,就像你到了一个陌生的城市。
这时候,就需要定位和地图了。
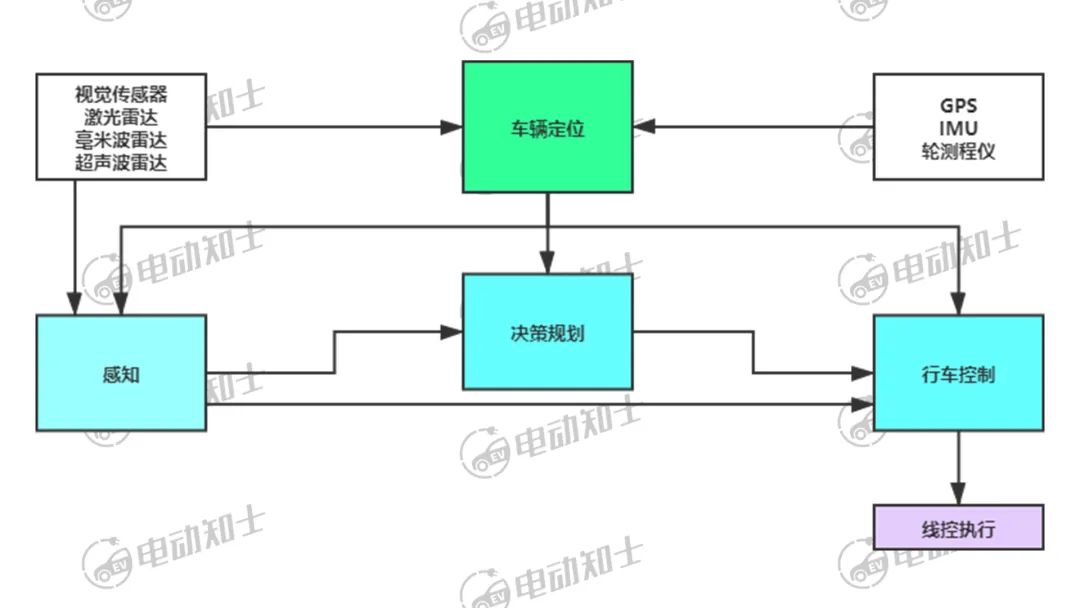
自动驾驶系统中,车辆定位是及其关键的。它影响到几乎所有的环节。通过GPS(卫星定位)、IMU(惯性测量单元)以及车轮测程仪等,车辆可以清晰地知道自己所在的位置,当前的运动状态(时速,加速度)等。
这时,感知系统就不仅知道了车周围有什么,还知道了车在哪条道路上,在往哪个方向行进。决策系统也知道了整片地区的道路信息,并会根据目的地规划合理的路线,以对行车控制做出指令。
这就是一套完整的自动驾驶流程,在理想状态下,这些就足以让车辆载着你安全到达任何一个地方。
但遗憾的是,以目前的技术水平,这种“理想状态”很难达到,因为车辆的感知和定位系统依然无法像人一样,可以识别出路上的所有信息,判断自己的准确位置,并且不受环境的影响。
例如,在高楼林立的市中心,GPS信号可能会被阻挡,这时车辆就会丢失自己的位置信息,让自动驾驶行程中断。

又或者,在雨雪天气,路上的车道线被积雪或积水覆盖,车辆仅凭环境感知系统难以实现车道的判别,从而可能导致事故征候。
再或者,目前的感知系统,还难以识别路上的坑洞、减速带、较低矮的路肩等等,在高速行驶过程中如果漏判了这些东西的存在,也会导致相对严重的后果。
更或者,在高速上下匝道时,有时会出现左右分流的车道,这时如果仅凭导航地图和环境感知,可能会让车辆出现快速变道的情况,乘坐体验会很差。
在这种技术条件下,想要实现L3级以上的自动驾驶,就需要高精地图出场了。
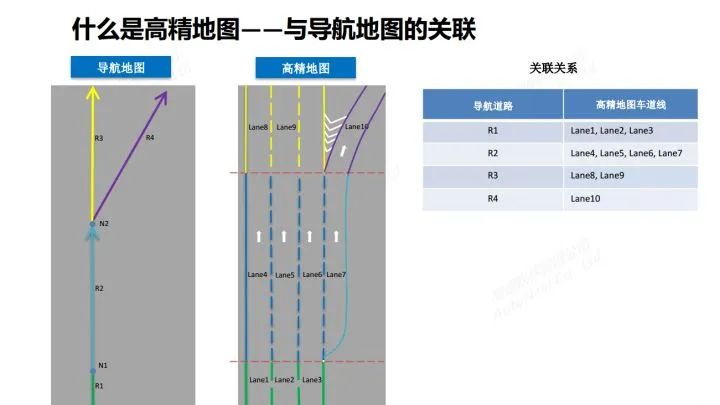
高精地图,顾名思义就是精度非常高的地图,一般来讲高精地图的精度都是分米级的,但它不仅仅是精度高,在数据的维度上相较普通的地图也更加丰富。
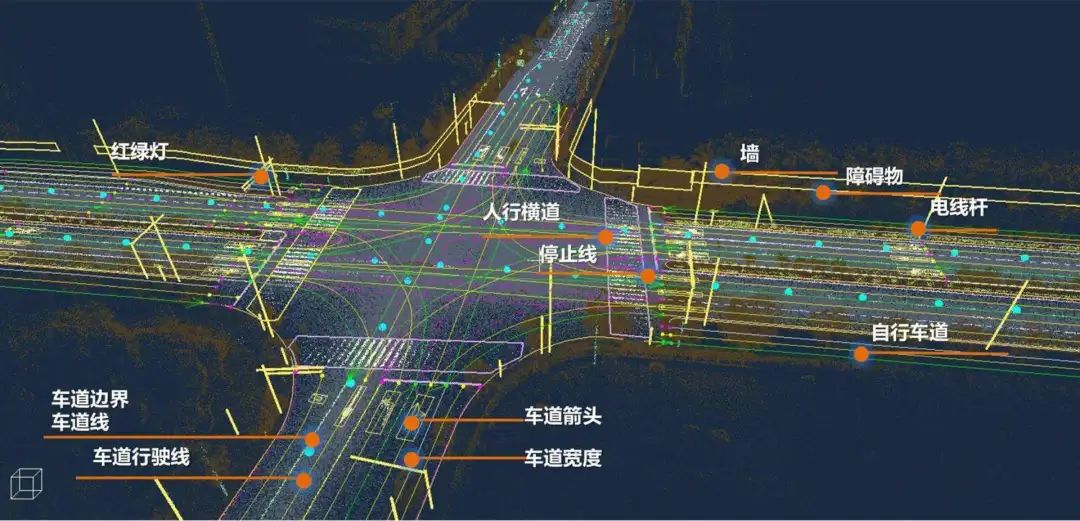
高精地图将大量的行车辅助信息存储为结构化数据,其中一类是道路数据,比如车道线的位置、类型、宽度、坡度和曲率等车道信息。另一类是车道周边的固定对象信息,比如交通标志、交通信号灯等信息、车道限高、下水道口、障碍物及其他道路细节,还包括高架物体、防护栏、数目、道路边缘类型、路边地标等基础设施信息。
图片出处:未来汽车大讲堂 - 网易云课堂 高精地图,自动驾驶的必由之路
简单来说,在高精地图的帮助下,车辆不需要环境感知就已经知道了道路的走向、曲率、详细的车道、限速,以及道路边线离路肩有多远,路边有几棵树,几个消防栓,几根电线杆,哪里有个限速标志,哪里有显著的地标等等等等。
而这些信息,让自动驾驶系统直接开了“上帝模式”。
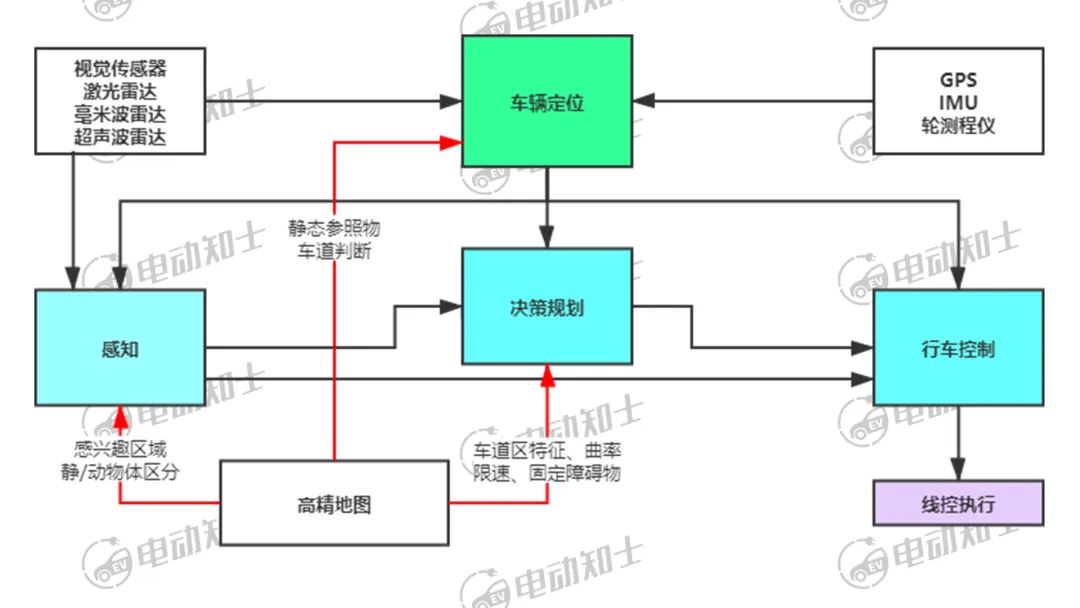
有了高精地图的帮助,可以让车辆的定位更加精准,即便在路况复杂区域定位也可以让定位系统向决策系统反馈更精准的车道信息,并让决策系统进行车道/线路规划。
同时,由于高精地图中含有大量的静态参照物,定位系统可以通过环境感知系统获取到的环境信息与地图信息进行比对,以此在GPS信号不佳的情况下,推算出车辆的实际位置,提高了整套系统的鲁棒性。
对于感知系统来说,高精地图可以对需要重点识别的区域进行划定,向感知系统表明这个区域是你的图像分析所关注的重点,并减少对其他区域的识别,这就是感兴趣区域(ROI)。使用ROI,可以降低感知系统的负荷,解放算力,以并增加关键区域的识别精度。
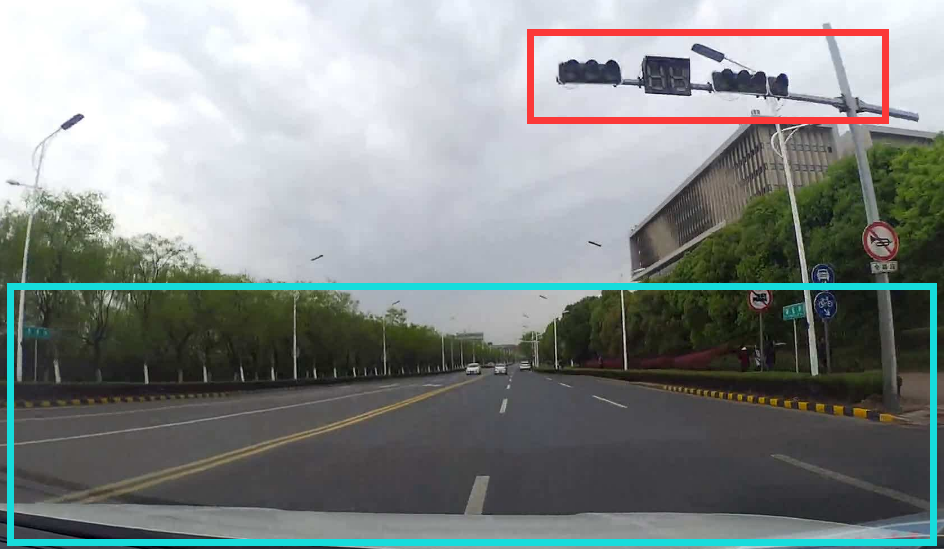
例如,一般情况下,前置摄像头只要重点识别画面的下半部分就可以了,因为画面的上边是天空,车辆和人员都不会从天上出现。但信号灯是个例外,它往往挂得比较高,所以要想事实识别信号灯,就要不停地从整个画面中搜寻,对算力的压力很大。但如果开启了ROI,在高精地图中标注上,在定位的某个点,画面的某个区域会出现信号灯,那么系统只要重点识别标注的这个区域就可以搜寻到信号灯,并完成识别。
对于决策系统来说,有高精地图的帮助,可以降低决策算法的复杂度,只要保证在不撞车的前提下,将车辆尽量平稳地开到目的地就可以。因为在高精地图中已经存有了详细的车道、固定障碍物信息,只要按照规划的路线走,就一定不会压到坑、骑上路肩,甚至撞到电线杆。
同时,详细的车道信息也可以让系统规划出更合理、更平稳的行车路径。例如前文提到的匝道问题,如果系统早已提前知道了岔路的存在,那么就会在还没看到路时早早变到相应道,提高行车舒适性。

而且,由于高精地图中详细标注了每条道路上的车道划分、车道宽度、每条车道的速度限制,这就让系统可以实现计划好更高效率的路线,让决策系统可以在行车过程中更专注于行车安全。
通俗点说,没有高精地图的车辆,在自动驾驶时所做出的的反应都是“条件反射”:看到红绿灯时才知道要减速;识别到电线杆时才知道不能撞上去。而有了高精地图的协助,车辆在行驶到红绿灯之前就已经准备减速了;在碰到电线杆之前就已经提前规划好了规避路线。
可以说,高精地图让自动驾驶汽车“有备而来”。
但从目前讲,高精地图也有一定的不足。首先因为其信息量大,在采集上难度会更高,采集的周期也会相应拉长,所以目前的高精地图,并不能做到大小路的全覆盖,基本上只覆盖了高速公路及主要的城市道路。
同时,在城市的不断建设中,高精地图所标注的要素有可能会出现改变,这就对高精地图的实时更新提出了很高的要求,而这也是高精地图在城市路况中应用的一大难点。
看到这你会发现,其实高精地图是个“可有可无”的东西:如果自动驾驶系统的识别成功率足够高,那么只需要人类常用的平面导航地图,一样可以实现全自动驾驶。
比如特斯拉,一直坚持表示自己不需要高精地图,因为他们认为自己的识别和决策算法足够强大,在不久的将来,只依靠实时识别和处理(条件反射),就可以在普通地图的基础上完成全自动的自动驾驶。
但遗憾的是,目前大部分的厂商包括即将推出L3量产车的这些自主厂商,在自动驾驶算法的积累上是不如特斯拉的,为了弥补感知上的不足,就需要高精地图所提供的超视距的感知能力和大量先验信息的补充。
在高精地图的帮助下,实现国标下的L3级自动驾驶完全没有问题。这也解释了,为什么自动驾驶进入L3时代后,高精地图也开始大范围应用。
既宣传了自己的技术力,又可以当成一个卖点和噱头,何乐而不为呢,你说是不是?

{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','http://www.evask360.com//data/attach/topic/2020-05/topicxA1214.jpg', '推荐 知士小管家@Tengu 的文章《自动驾驶进入L3时代,为什么大家都需要高精地图?》','http://www.evask360.com/article-991.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}